Bei Fotos vom Sternhimmel gilt es, Licht zu sammeln. Für Einzelaufnahmen braucht es ein lichtstarkes Objektiv und lange Belichtungszeit. Je nach Brennweite und Sensortyp der Kamera kann man aber nur wenige Sekunden belichten, bevor Leuchtspuren der Sterne entstehen.
Anders, wenn man mehrere Fotos mit geringerer Belichtungszeit machen kann und diese dann zu einem kontraststärkeren Bild kombiniert. Das ist mitunter nicht so einfach, denn die Sterne drehen sich für den Betrachter auf der Erde um den Polarstern herum. Damit man keine Stacking-Software benötigt, welche die Teilbilder richtig übereinanderlegt, kann die Kamera der virtuellen Drehung des Sternhimmels nachgeführt werden.

Ähnlich funktionieren auch Teleskopantriebe und es gibt recht teure Lösungen, auf denen man seine Digitalkamera befestigen kann. Baut man so ein Motorstativ nach, kommt man mit weniger Investition aus und kann alles auf seine eigenen Bedürfnisse anpassen.
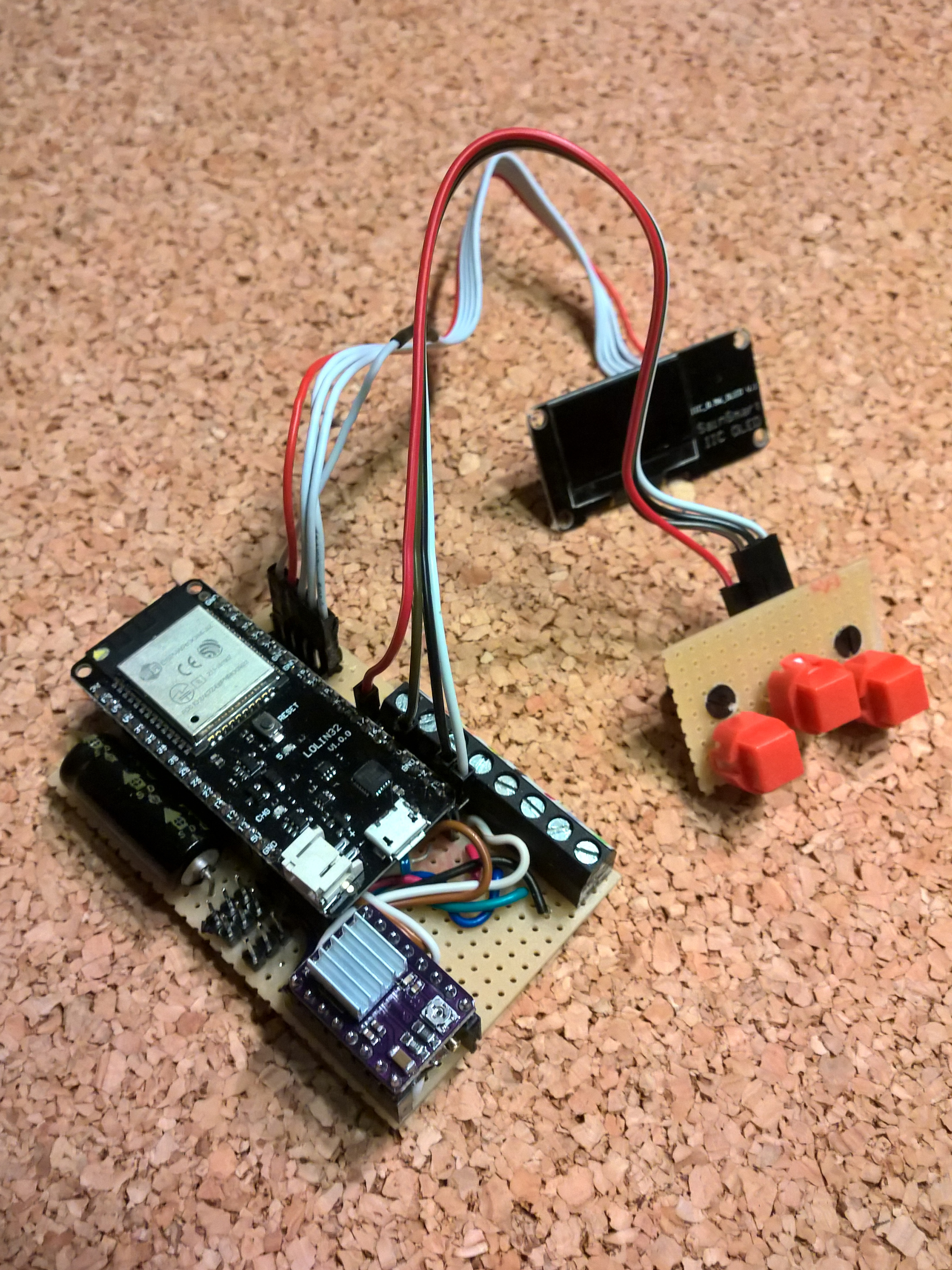
So ist bei mir das Vorhaben zum Bau einer motorgetriebenen Nachführung einer Spiegelreflexkamera entstanden. Die Drehung soll ein Getriebeschrittmotor übernehmen, welcher durch einen ESP32 angesteuert wird. Wie immer haben wir die ersten Tests der Elektronik auf einem Breadboard vorgenommen.

Die Treiberplatine übernimmt das Management der Spulen des Motors, ihr Steuerteil bekommt eine kräftigere Stromversorgung als die restliche Logik. Am Treiber legt man mit einem Potentiometer eine gewisse Referenzspannung an, je nach dem, welcher Strom zum Steppermotor fließen soll. Wir haben ein kompaktes Modell DRV8825 gewählt, bei dem nun ein Strom von maximal 1A pro Motor-Spulensatz festgelegt wird. Dafür gibt es auch entsprechende Anleitung im Web.
Vom Mikrocontroller müssen dann nur noch Schritt und Richtung an den Motortreiber übermittelt werden. So reichen zwei Steuerleitungen vom ESP32 aus, D17 ist mit dem Direction-Pin und D16 mit dem Step-Pin des DRV8825 verbunden. Je nach dem, was man für ein ESP-Board hat (bei uns ein Wemos Lolin32), muss man schauen, wo die diversen Anschlüsse konkret liegen.

Als Unterbau für die mechanische Konstruktion sollte ein vorhandenes Stativ dienen, bei dem alle Drehgelenke entfernt wurden. Darauf soll nun die neue Mechanik montiert werden. Unserer Methode liegt zu Grunde, dass sich die Befestigungsachse der Kamera (Motorachse) parallel zur Drehachse der Erde befindet. Zu diesem Zweck ist eine „Polwiege“ konstruiert, klappbar und mit Feststellmöglichkeit. Der Öffnungswinkel, mit dem später die Motorachse nach oben zeigen muss, muss der nördlichen Breite vom aktuellen Standort entsprechen.

Im oberen Schenkel der Polwiege wurden Getriebe, Motor, Display und Bedientaster untergebracht, die Leiterplatte mit der eigentlichen Elektronik liegt weiter unten. Auf dem Getriebe wird später ein Kugelkopf mit Schnellwechselplatte für die Kamera montiert, wie auch unser Zielfernrohr, das sind alles im Fotozubehör erhältliche Teile.

Wichtig war uns noch eine Gewichtsentlastung, so ist die Antriebswelle zwischen Motorgetriebe und Kugelkopf noch einmal extra fixiert. Die Platine mit der Elektronik zeigt nach unten. Über den I2C-Bus wird noch ein Display angebunden, und für unsere geringe Anzahl an Eingabetastern sind noch genügend digitale Eingänge am ESP32-Board frei.
Bevor alles montiert wird, testen wir den Elektronik-Teil noch einmal separat. Hier unsere Bauteilliste für das Wesentliche:
– Espressif ESP32
– NEMA17-kompatibler Schrittmotor, bipolar, mit Planetengetriebe
– DRV8825 Schrittmotortreiber-Modul
– OLED-Display mit I2C-Anschluss
– Kugelkopf mit Schnellwechselplatte
– Teleskop-Sucherfernrohr mit Fadenkreuz
– 5V Powerbank, DC/DC-Wandler
– drei Drucktaster, diverse passive Elektronik
– ein ausgedientes Stativ
– und alle mechanischen Bauteile
Nun zum praktischen Einsatz. Bevor man loslegt, bringt man das Stativ gut in Waage. Man stellt grob den Anstiegswinkel und über einen Kompass die Nordrichtung in etwa ein. Zur exakten Justierung ist bei uns ein Polfinder in Form eines Zielfernrohrs vorgesehen. Jetzt gilt es also noch den Polarstern ins Fadenkreuz zu bringen und die Feinausrichtung zu machen.
Wenn nicht eingebaut, bekommt die Kamera einen programmierbaren Fernauslöser. Der löst die Aufnahmen entsprechend der Intervalle der Drehbewegung aus. Man braucht nur wenige Bilder. Wenn sich also kleinere Ungenauigkeiten bei der Ausrichtung eingeschlichen haben, wirken sich diese bei der geringen Betriebszeit der Vorrichtung kaum aus.
Gebräuchliche Stepper brauchen ohne Getriebe 200 Vollschritte zu je 1,8° für eine ganze Umdrehung. Unser Getriebe untersetzt mit 1:26,8 und beschert uns dadurch vor allem die nötige Kraft, um auch eine große Spiegelreflexkamera mit schwerem Objektiv zu bewegen. Eine vollständige Rotation des Sternhimmels um den Polarstern dauert logischerweise 24 Stunden. So müssen wir den Stepper alle 16,1s einen Schritt gegen den Uhrzeigersinn machen lassen. Genug Zeit für den automatischen Auslöser der Kamera, die nächste Aufnahme zu starten und bspw. 10s zu belichten.
Eigentlich wenig Arbeit, für den ESP32 eine passende Firmware zu entwerfen, welche nun den Treiber des Steppermotors in passenden Abständen ansteuert. Deshalb haben wir zusätzlich zum Normalbetrieb gleich noch einige Hilfsmittel mehr untergebracht, um bspw. den Kamerakopf schneller vor- oder zurück bewegen zu können, oder eine Nullstellung festzulegen, um auf diese bei Bedarf wieder zurückfahren zu können. Das alles ist in einem kleinem Menü untergebracht und über drei Taster steuerbar.
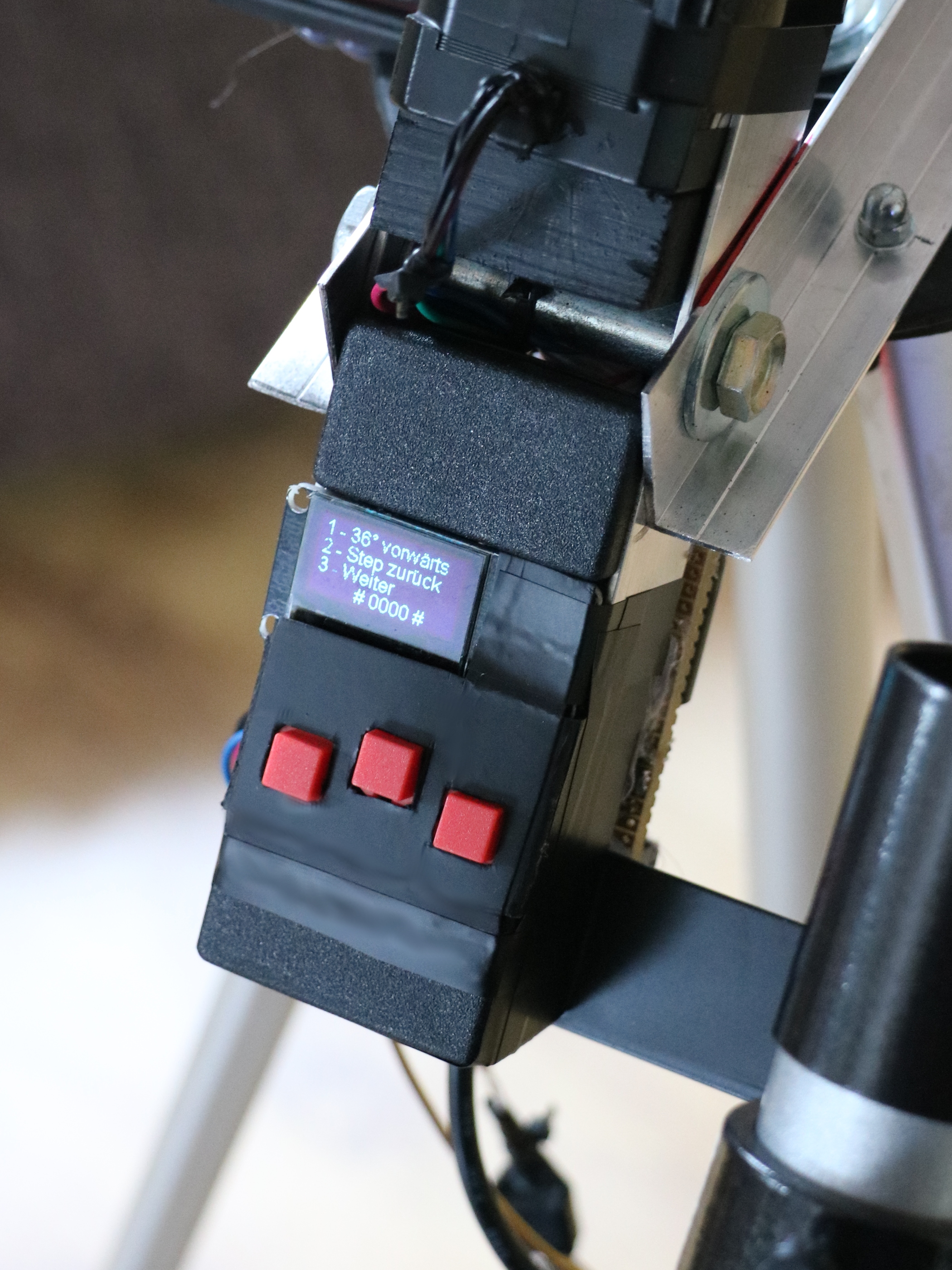
Das OLED-Display führt durch das Menü und zeigt den aktuellen Winkel und die Dezimalgrad zur Nullstellung an. Im laufenden Betrieb wird man über die Anzahl der absolvierten Steps informiert. Die optische Anzeige nebst großen Tasten und eine einfache Bedienerführung hat sich als vorteilhaft herausgestellt, denn solche Aufnahmen macht man am besten bei Neumond und mitten in der Natur, wo keine künstlichen Lichtquellen stören. Und da muss man eben auch bei völliger Dunkelheit mit der Apparatur zurecht kommen.
So sind unsere Menü-Ebenen derzeit ausgestaltet:
1 – 36° vorwärts 2 – Step zurück 3 – Weiter
1 – Fahre auf 0-P 2 – Nullung 3 – Weiter
1 – Start! 2 – 360°-Test 3 – Zurück
Die Nummerierung auf dem Display entspricht der Anordnung unserer Eingabetaster 1 bis 3, mit „Weiter“ geht es in die nächste Ebene, mit „Zurück“ ins erste Menü. So lassen sich auf dem kleinen Display eine ganze Reihe von Funktionen unterbringen.
Mit „Start!“ geht es los. Die Software startet den Antrieb gemäß der definierten Intervalle und man startet dann den automatischen Auslöser der Kamera. Jetzt werden die einzelnen Bilder erstellt und nach jeder Aufnahme die Kamera auf unserem Motorstativ dem wandernden Sternhimmel wieder nachgestellt. Im Ergebnis bekommt man die gewollten Einzelaufnahmen, welche am Ende deckungsgleich und bereit für die Weiterverarbeitung sein sollten.
Im Gelände wird die Elektronik des Motorstativs über ein übliches 5V-Akkupack gespeist, die höhere Spannung für den Schrittmotor durch einen nachgeschaltenen DC/DC-Wandler bereitgestellt. Ist man in Reichweite einer Steckdose, zum Beispiel im heimischen Garten oder Balkon, lässt sich auch mit einem Netzteil arbeiten. Denn dort macht man dann günstigerweise auch die notwendigen Tests, damit sich schnell diverse Erfolge einstellen.
Denn was geeignete Kamera-Einstellungen für die Einzelaufnahmen betrifft, das ist wohl eine eigene Kategorie, und da sind etwas erfahrene Fotografen im Vorteil. Bei uns hat sich ein weitwinkliges 11-16mm Objektiv mit Offenblende f/2.8 bewährt, mit dem wir für circa 10 Sekunden bei ISO800 belichten. Der Schrittmotor stellt bei uns alle 16s weiter, dann gibt es die nächste Aufnahme.
Das ist fest kodiert, braucht man da andere Zeiten, lässt sich das aber einfach in der Firmware korrigieren und auf den ESP wieder neu hochladen. Die Quellen dazu sind auf Git-Hub unter https://github.com/swenae/starfoto zu finden.
Den Sketch dort („starfoto.ino“) kann man mittels der Arduino-IDE oder alternativer Werkzeuge auf den ESP32 übertragen und nach Anlegen der Versorgungsspannung steht das Startmenü bereit.
Ab circa zehn Aufnahmen hat man genug Bildmaterial gesammelt, um in die Weiterverarbeitung zu gehen. Jetzt zeigt sich der Vorteil unserer motorgesteuerten Nachführung, denn die einzelnen Aufnahmen sollten fast passig sein, um sie mit einer Bildbearbeitungssoftware recht einfach übereinander legen zu können. Sollte vorher die Ausrichtung vom Stativ nicht genau gepasst haben, kann man diverse Ungenauigkeiten in der Software noch etwas korrigieren.

Ein freies Tool wie „Gimp“ ist gut geeignet, um die Einzelaufnahmen additiv zum letztendlichen Bild zu kombinieren. Und man merkt den Vorteil von gestaffelten Aufnahmen gegenüber dem Einzelbild, wo sich das in der Nacht unvermeidliche Bildrauschen der Kamera gegenseitig etwas aufhebt, so dass der Hintergrund im resultierenden Bild ebener wird und sich auch leuchtschwache Sterne gut herausarbeiten lassen. Das recht helle Ergebnis braucht dann noch etwas Nachbearbeitung. Da hat es meiner Meinung nach wenig Regeln und es kommt auf die Kreativität vom Bearbeiter an. Mitunter ist nur ein Weißabgleich angesagt.

Mittlerweile war unser Motorstativ öfters im praktischen Einsatz und hat sich gut bewährt. So sind bei uns schon einige interessante Motive vom Sternhimmel entstanden.