Mittels Raspberry Pi und PiCam haben wir schon einige Vorhaben realisiert. Eine Scanvorrichtung, Webcam und Fotofalle zur Tierbeobachtung. Letztere ist schon erneuert worden und auch unsere Webcam gibt es schon in der zweiten Generation mit dem Raspberry Pi Zero. Der eignet sich gut im Zusammenspiel mit den originalen Kameramodulen und braucht wenig Platz.
Da lag es für uns nahe, mit dem Zero eine kompakte Kamera aufzubauen, welche man auch unterwegs gebrauchen kann. Heutzutage hat zwar jeder ein Handy dabei und kann Schnappschüsse machen, aber da ist ja noch unser Hobby der Infrarotfotografie. Die IR-Variante, also die NoIR-Cam für den Pi, ist für den Hobbyfotografen nachwievor interessant, da sie den Infrarotanteil des Tageslichts für den Bildsensor nicht sperrt, sondern ungedämpft durchlässt. Ohne Umbau kann man in dieser Art und Weise nur noch ältere Digitalkameras zufriedenstellend nutzen.
Für den Außeneinsatz eines Pi gab es bei uns bisher nur ein Provisorium, den großen Raspi im Kartongehäuse. Relativ globig und ohne großen Bedienkomfort. Auch für die Stromversorgung und eine ordentliche Filterhalterung entstanden Ideen.
Also aufgemacht, um auch unsere mobile Variante auf einen neuen Stand zu bringen und dort gleich den kleinen „Zero“ einzusetzen. Beide Einsatzfälle sollten abgedeckt werden, um am Tag Effektaufnahmen mit Infrarotfilter oder ganz normale Aufnahmen machen zu können. Man sollte sie gut in der Hand halten oder abstellen können. Da sie aber nicht in der Nacht oder etwa unbeaufsichtigt genutzt werden soll, braucht es kein spezielles wasserdichtes Gehäuse.
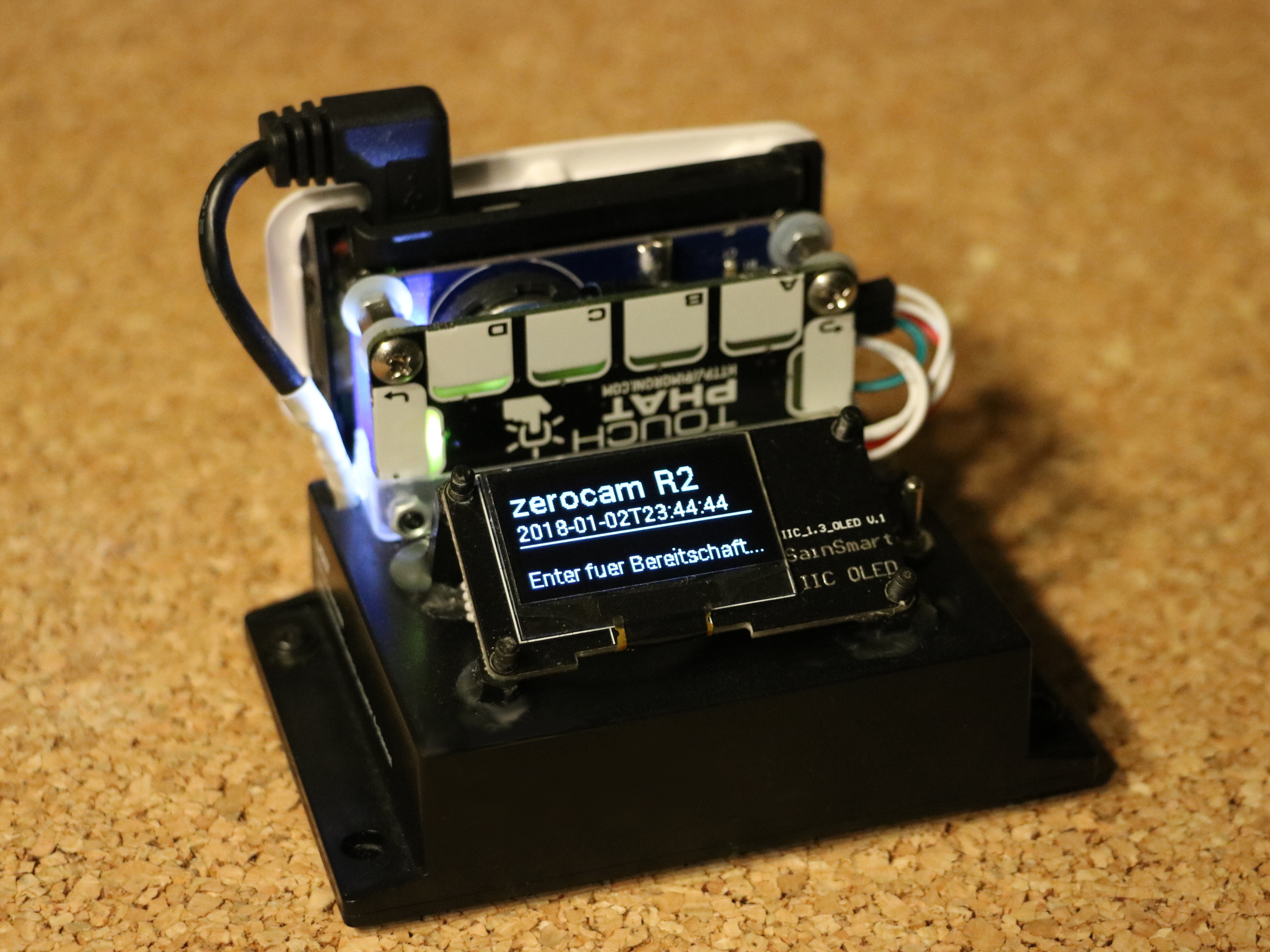
So kommt unsere neue „ZeroCam“ mit einem Touchpad, Echtzeituhr und OLED-Display daher. Die einzelnen Module sind auf einer Konsole mit integriertem Akku angebracht.
Mittlerweile findet man auch Multifunktions-Kameramodule für den Pi, wo bei Bedarf ein Infrarotfilter vor dem Objektiv eingeschwenkt wird. Die funktionieren mitunter aber nicht zufriedenstellend, oft wird über Probleme mit der Mechanik berichtet. Außerdem ist so etwas nur die halbe Miete, denn man tauscht damit nicht die ganze Kamera, sondern nur den Filtervorsatz und muss somit immer mit der NoIR-Cam arbeiten. Für normale Aufnahmen ist die aber nicht geeignet, bringt da farbverfälschte Bilder hervor.
Bei unserem Aufbau lässt sich deshalb der komplette Kopf an der Front wechseln, wodurch die ganze Hardware (Pi und Cam) ausgetauscht wird. Das erschien mir die optimale Lösung, um sowohl gute Aufnahmen unter Normallicht (Kopf mit normaler PiCam) oder im Effektmodus (Kopf mit NoIRCam und Infrarotfilter) machen zu können.

Grundlage für unser Projekt ist der Raspberry Pi Zero W. Eine Beschreibung zur Inbetriebnahme möchte ich mir an dieser Stelle sparen, denn mittlerweile gibt es einige Anleitung im Web dazu. Gut, dass der Raspberry eine große Community hat, wo viele längst auch ihre Erfahrungen mit dem kleinen Zero teilen.
Durch seine Größe und integriertem WiFi bleibt auch bei uns alles schön kompakt. Dazu trägt auch die Verfügbarkeit von diversen Pi-Hats bei, welche man gut stapeln kann.
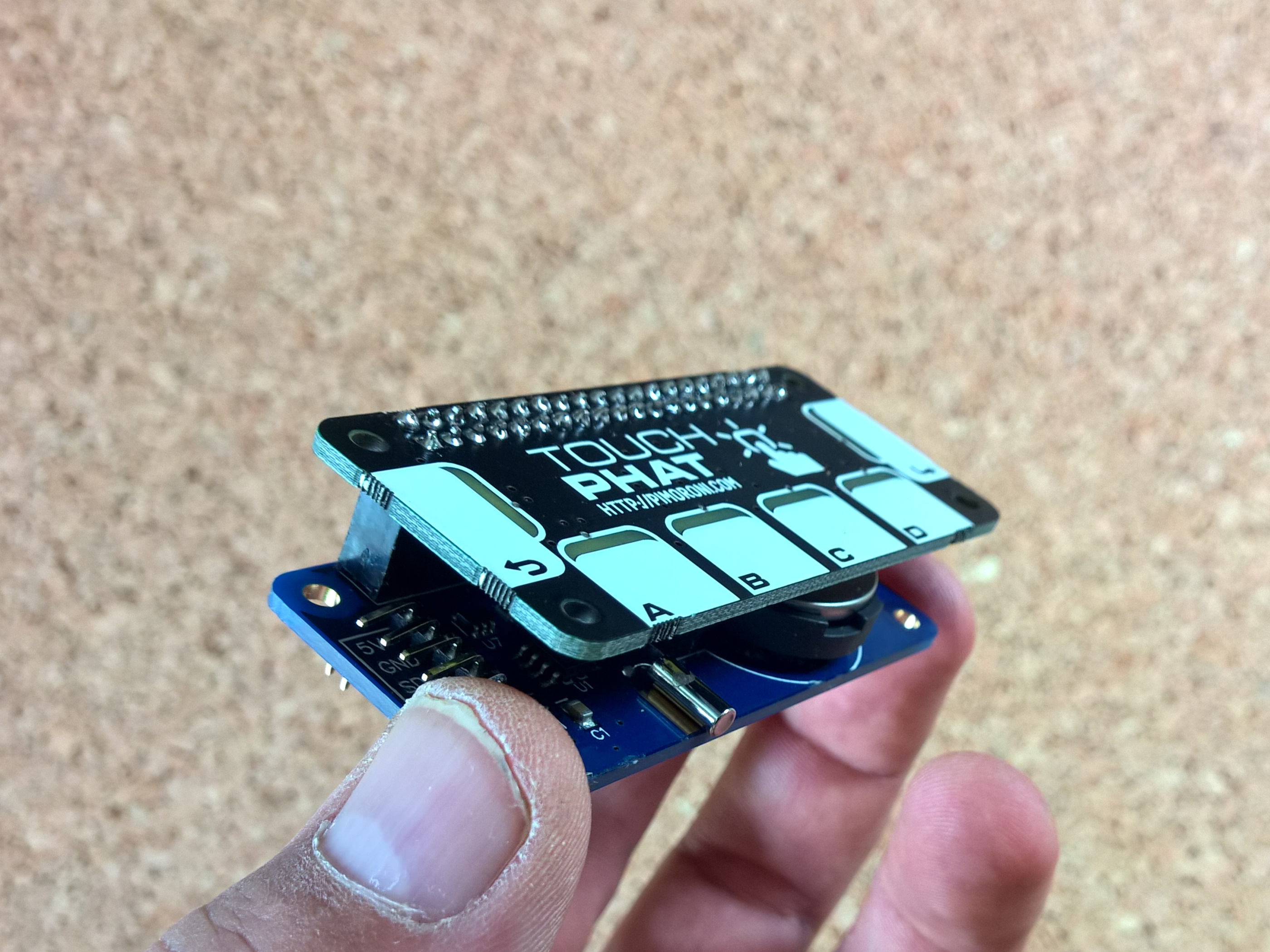
Auf diese Weise haben wir auch eine RTC-Echtzeituhr und ein Touchpanel angebunden. Der „Touchphat“ bietet sechs beleuchtbare Eingabeflächen. Die LEDs lassen sich gezielt einzeln ansteuern.
Es gibt gute Python-Unterstützung dafür. Günstig, wenn man wie wir auch das Steuerskript auf dem Pi in Python aufgebaut hat. Die Installation des „Touchphat“ geschieht unter Raspbian mittels
$ sudo apt-get install python-touchphat
oder in Python3 mit:
$ sudo apt-get install python3-touchphat
Wer sich zuerst anhand von Beispielen einarbeiten möchte, kann das Git-Archiv von Pimoroni klonen und dann in den Verzeichnissen stöbern:
$ git clone https://github.com/pimoroni/touch-phat.git
Das RTC-Modul hat bei uns die Aufgabe, den Dateinamen der aufgenommenen Bilder einen Zeitstempel zu verpassen. Denn draußen im Feld hat der Pi keine Internetverbindung, wo er sich nach dem Hochfahren mit einem Zeitserver abgleichen könnte. In Kombination mit einem fortlaufenden Index steht für die aktuelle Aufnahme somit immer ein eindeutiger Filename zur Verfügung. Und es werden keine Bilder überschrieben, wie man es beim käuflichen Fotoapparat so kennt.
Startet man unsere Kamera im Einzugsbereich vom heimischen WLAN, synchronisiert sich die Echtzeituhr automatisch auf die aktuelle „Netzzeit“ neu. In die Metadaten der Bilder kommt derzeit noch nichts, das wäre aber eine gute Erweiterung für die Zukunft und nicht so schwierig zu implementieren.

Den vorhin beschriebenen „Kopf“ unserer ZeroCam bildet das bekannte Gehäuseset mit „Himbeere-Logo“, wo man zwischen mehreren Varianten mit verschiedenen Aussparungen auswählen kann. Wir brauchen auf der Rückseite eine Öffnung für die GPIO-Leiste und an der Front das kreisrunde Loch für das Objektiv und wählen die zwei entsprechenden Schalen aus. Im Set ist auch ein kurzes Flachkabel mit der Verjüngung auf den kleineren Kameraport des Zero dabei.

Da es kleine Abweichungen zwischen den Revisionen 1.3 und 2.0 gibt, passen in die gelochte Oberschale des Set nur PiCams der neuen Generation richtig rein. Die älteren PiCams ecken an, weil da rund um den Bildsensor das schwarze Plastik anders geformt ist. Das stört uns aber nicht, denn wir bohren den Deckel für den späteren Filteraufsatz großzügig auf. Zwei „Köpfe“ haben wir uns nun aufgebaut, jeweils mit einem Pi Zero, einer normalen PiCam und einer NoIR-Cam. Am besten man arbeitet auch mit zwei Micro-SD-Karten. Beide Pi sind dann am Router als eigenständige Geräte angemeldet und können wechselseitig verwandt werden. Vor dem Schließen der Gehäuse kann man einen kurzen Test der Cams wie gewohnt mittels
$ sudo raspistill -o test.jpg
machen. Ist der Pi schon im lokalen Netzwerk, funktioniert das auch wie üblich in einem Terminal auf einem entfernten Desktop, wo man sich vorher mittels ssh verbunden hat. Hat man auf dem Raspi feh installiert, dann kann man ssh mit der X-Option aufrufen und sich das durch raspistill geschossene Bild gleich anzeigen lassen:
$ sudo raspistill -w 1200 -h 800 -o test.jpg ; feh –scale-down test.jpg
Ein bequemer Weg, denn es braucht dadurch weder einen X-Desktop auf dem Raspi, noch eine Dateiübertragung um das Aufnahmeergebnis grafisch sehen zu können.

Nach hinten schauen die Anschlüsse des Zero mittels Stiftleiste. Damit wird an den Rumpf der Kamera angedockt, also an die oben beschriebenen Module von RTC und Touchpanel. Die sind Teil vom restlichen Gehäuse. Im Fuß sind Ladeelektronik und Akku untergebracht. Zum Laden ist eine Micro-USB-Buchse nach außen geführt.
In der Ansicht auf die Unterseite fehlt im folgenden Bild noch die Bodenplatte, in die haben wir zwei Aussparungen vorgesehen, damit man die Status-LEDs der Ladeplatine von außen sehen kann. Die war dann auch keine eigene Entwicklung, sondern ein Fertigkauf. Heutzutage findet man recht gute Elektronik, die als Lader für einen 3.7V Lipoakku Strom von einem handelsüblichen 5V-Netzteil nehmen kann und gleichzeitig die Versorgung für den Verbraucher managed.

Bei uns sieht man also über diverse LEDs durch die Bodenplatte, ob die Betriebsspannung noch OK ist, ob gerade geladen wird, und ob etwa schon vollgeladen ist. Mit 2000mAh kommt man gut über den Tag und kann jede Menge Fotos machen. Damit sind schon fast alle Komponenten beschrieben. In der Vorderansicht sieht unsere Kamera so aus:
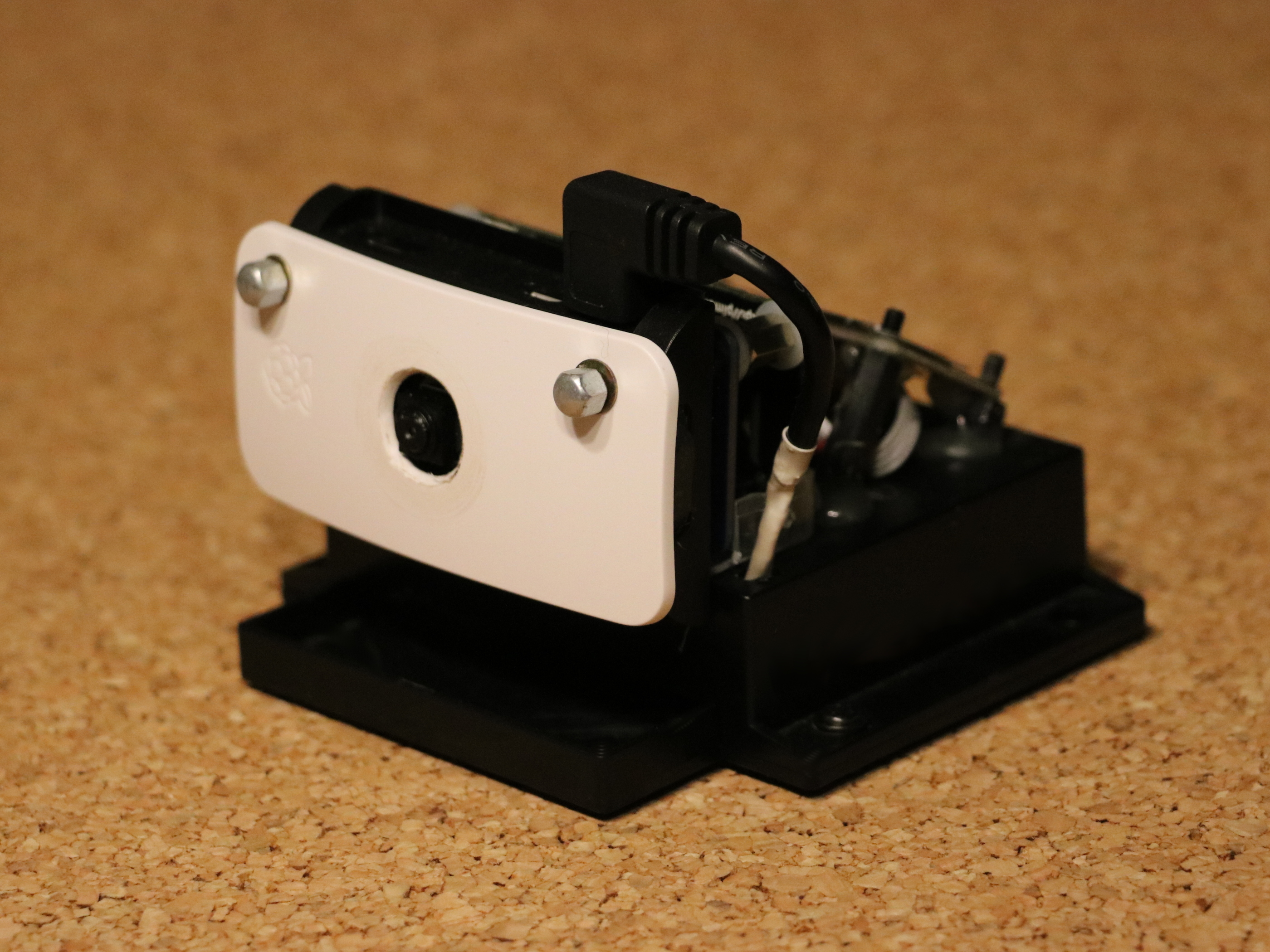
An der Front sieht man die weiße Oberschale des originalen Zero-Gehäuse noch, zusätzlich zum Klickmechanismus ist die für den Außeneinsatz durch zwei Hutmuttern gesichert. Der Rest ist schwarz lackiert worden. Löst man oben den geknickten USB-Stecker zur Stromversorgung, kann man den Kamerakopf inklusive Pi an der GPIO-Verbindungsleiste komplett abziehen und die Kameraversion wechseln.
Dahinter sind das RTC- und Touchmodul angesteckt. Der Kamera haben wir absichtlich einen breiten Fuß spendiert, weil dadurch genügend Platz für die Stromversorgung und diverse Buchsen entstehen konnte, nebst Montagefläche für das Display. Außerdem kann man das Ganze nun ordentlich auf einer ebenen Unterlage aufstellen.
Der Normalbetrieb funktioniert nun, aber der Kopf mit NoIR-Cam braucht noch einen Objektivaufsatz für den Infrarotfilter.

Deshalb wurde in die erweiterte Gehäuseöffnung noch ein Innengewinde geschnitten, in das ein kurzer Tubus mit dem Filter eingedreht werden kann. Darauf sitzt noch eine Schutzkappe. Die benötigten Teile kamen von einem Handy-Aufrüstset.
Da ist das Filterglas natürlich nicht bei und man muss einen käuflichen IR-Filter zerstören. Ich habe jedenfalls keine Miniaturvariante eines Filter von Hoya oder Panasonic gefunden. Denn das sind welche mit einem Schraubgewinde für die gängigen Objektivgrößen von professionellen Kameras. Mit etwas Glück gewinnt man von denen aber eine kleine Scherbe, die in den kleinen Durchmesser hineinpasst und eingeklebt werden kann.
Unsere anderen Kameras auf Basis Raspberry Pi sind stationär und liefern ihre Bilder mehr oder weniger automatisch. Da braucht es wenig Anzeige- und Bedienelemente am Gehäuse. Für unsere mobile Kamera sollte es da schon etwas mehr Komfort sein, deshalb ist noch ein OLED zur Informationsausgabe verbaut worden.
Ich wollte gerne ein etwas größeres 1.3″-Display mit I2C-Anbindung einsetzen. Ein geeignetes OLED von Sainsmart hat den sh1106-Controller. Im Luma-Projekt gibt es Unterstützung dafür. Zuerst sollte man alle Abhängigkeiten installieren:
$ sudo apt-get install python-dev python-pip libfreetype6-dev libjpeg-dev build-essential
Und dann mittels pip die Python-Library:
$ sudo -H pip install –upgrade luma.oled
Über den Git-Hub geht das auch. Die Codebeispiele sind seit einiger Zeit noch an eine dritte Stelle ausgelagert worden, so dass sich auf jeden Fall noch
$ cd ~
$ git clone https://github.com/rmhull/luma.examples.git
$ cd luma.examples
$ sudo -H pip install -e
empfiehlt, so dass man diese Samples als Grundlage für die eigene Entwicklung auch noch parat hat. Das kann nicht schaden.
Ist das Display am I2C-Port des Pi richtig verbunden, am besten eine Überprüfung mittels
$ i2cdetect -y 1
machen, ob an Adresse 0x3C das Display erscheint.
Mittels dem Python-Script „demo.py“ aus den Samples kann man jetzt einen ersten Funktionstest wie folgt machen:
$ python demo.py [–i2c-port 1 –i2c-address 0x3C] -d sh1106
Wenn alles geklappt hat, sollte man eine solche Ausgabe bekommen:
Display: sh1106
Interface: i2c
Dimensions: 128 x 64
Testing basic canvas graphics…
—————————————-
Testing contrast (dim/bright cycles)…
Testing display ON/OFF…
Testing clear display…
Testing screen updates…
Unsere Zerocam hat einen kleinen Kippschalter, welcher den Akku vom Pi und restlicher Elektronik trennt. Im ausgeschaltenen Zustand bleibt sie durch die geringe Selbstentladung des LiPo lange betriebsbereit und man kann sie bis zum nächsten Einsatz im Schrank stehen lassen. Nach dem Einschalten wird das Startskript über einen rc.local-Eintrag mittels
python zerocam.py -d sh1106
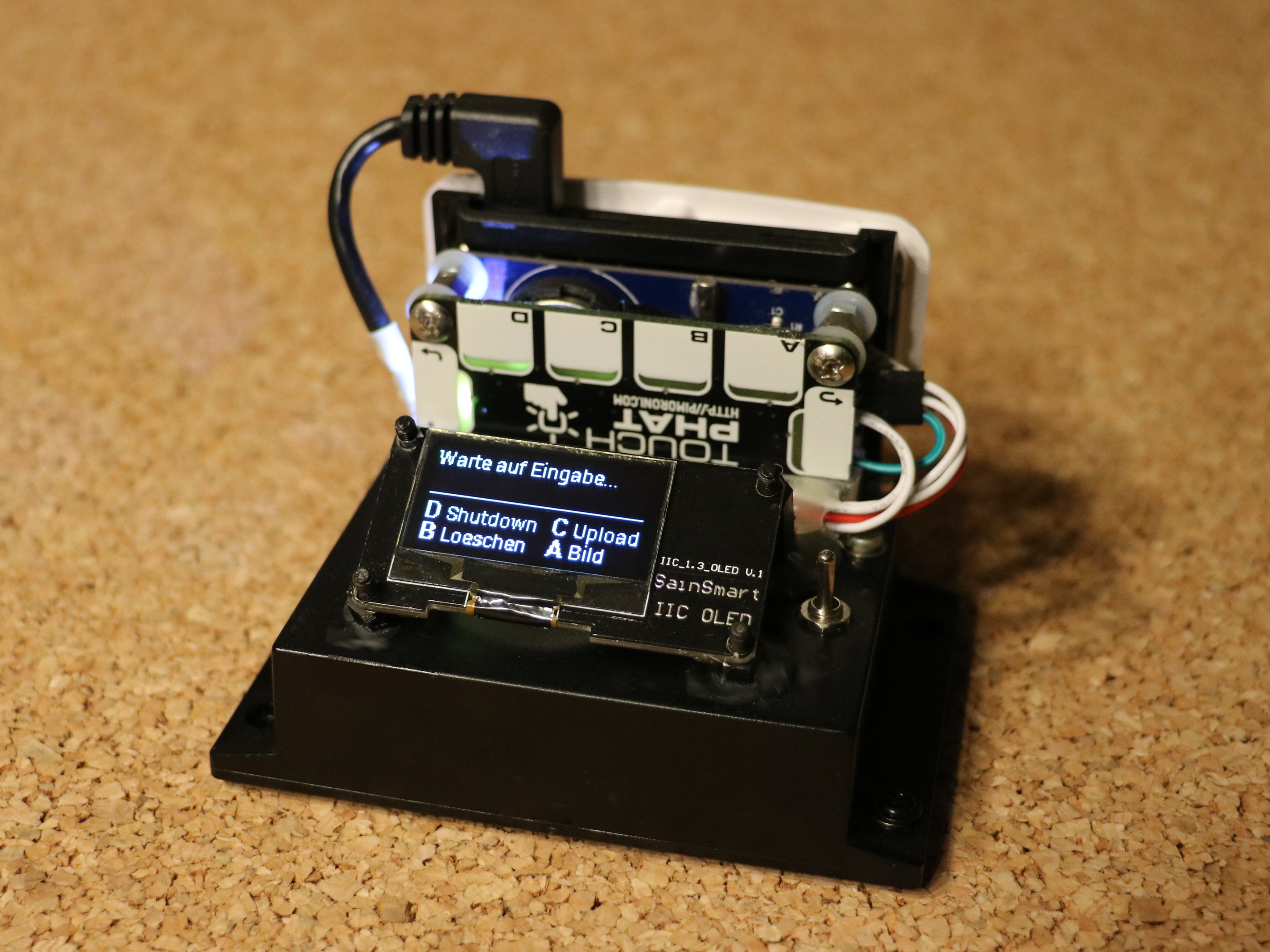
aufgerufen, wo alle notwendigen Bibliotheken eingebunden sind. Nach der Initialisierung der verbauten Module gibt es einen Statusscreen und nach Eingabe von Enter erscheint auf dem Display zuerst unser Hauptmenü:
D – Shutdown C – Upload
B – Löschen A – Bild
Für die Ablaufsteuerung erschien uns der Eventhandler des Touchphat gut geeignet, um bei Berührung eines der Panels entsprechend zu verzweigen:
def handle_touch(event):
…Bei jeder Eingabe ausführen …
if (event.name == ‚A‘):
…Bei Touch von Panel ‚A‘ …
…
if (event.name == ‚Enter‘):
… Bei Touch von ‚Enter‘ …
Damit sind die vier wesentlichen Funktionen des Hauptmenü abgebildet. Von hier aus lässt sich eine neue Aufnahme machen, aufgenommene Bilder per FTP uploaden, der lokale Bildspeicher auf der SD-Karte löschen und die Kamera herunterfahren. Für die Flächen fünf und sechs des Touchphat (Enter, Back) sind auch schon passende Symbole aufgedruckt.
Wird eine Aktion ausgeführt, gibt es entsprechende Informationen auf dem Display dazu. Damit man diese im Fehlerfall auch ordentlich lesen kann, wird immer erst nach Back wieder zum Hauptmenü zurückgekehrt. Unterstützung gibt es auch durch die den Panels hinterlegte LED-Beleuchtung. So wird erfolgreiches Antippen durch kurzes Aufleuchten bestätigt. Denn es fehlt ja die Haptik einer mechanischen Tastatur. Wird zur Quittierung ein OK oder ein Abbruch erwartet, dann lassen wir die in Frage kommenden Flächen ständig leuchten und sie erlischen erst, nachdem man eine der geforderten Eingaben getätigt hat.
Solcherlei Hilfe hat sich für den Außeneinsatz als recht günstig erwiesen. Mit dem, was wir zum Bedienkonzept der ZeroCam entworfen haben, bin ich also recht zufrieden. Die Aufnahmequalität wird wiederum von den Kameramodulen für den Pi bestimmt. Unabhängig von der Version, lohnt sich das kleine Festbrennweiten-Objektiv für Aufnahmen in die Landschaft bei gutem Licht. Für unsere Effektaufnahmen mit NoIR-Cam und Filtervorsatz braucht es viel Sonne und wenig Bewegung, dann werden sie gut.
Besonders glücklich bin ich deshalb, dass ich kein Provisorium mehr mit mir herumtragen muss, was aus lose zusammengefügten Teilen besteht. Es ist eine kompakte Kamera geworden, wo ich weiß, dass ich alles an Bord habe. Um festzustellen, ob ich vorher noch laden oder für neue Bilder Platz schaffen muss, reicht nach dem Einschalten nun ein Blick auf das Display…
Das Projekt hört sich sehr spannend an. Was ich vermisse, ist eine Einkaufsliste, wo ich die Komponenten herbekomme oder habe ich etwas überlesen.
Viele Grüße
Horst Meyer
Hallo Horst, vielen Dank für Dein Interesse. Und, oh ja, da gebe ich Dir Recht. Beim drei Jahre alten Projekt krieg ich das leider nicht mehr hin mit einer Einkaufsliste, werd‘ mich aber versuchen zu bessern, diverse Anfragen sind mir da nicht neu. Schau aber gerne trotzdem wieder rein hier. Viele Grüße, Swen.