Unser Roboterarm.
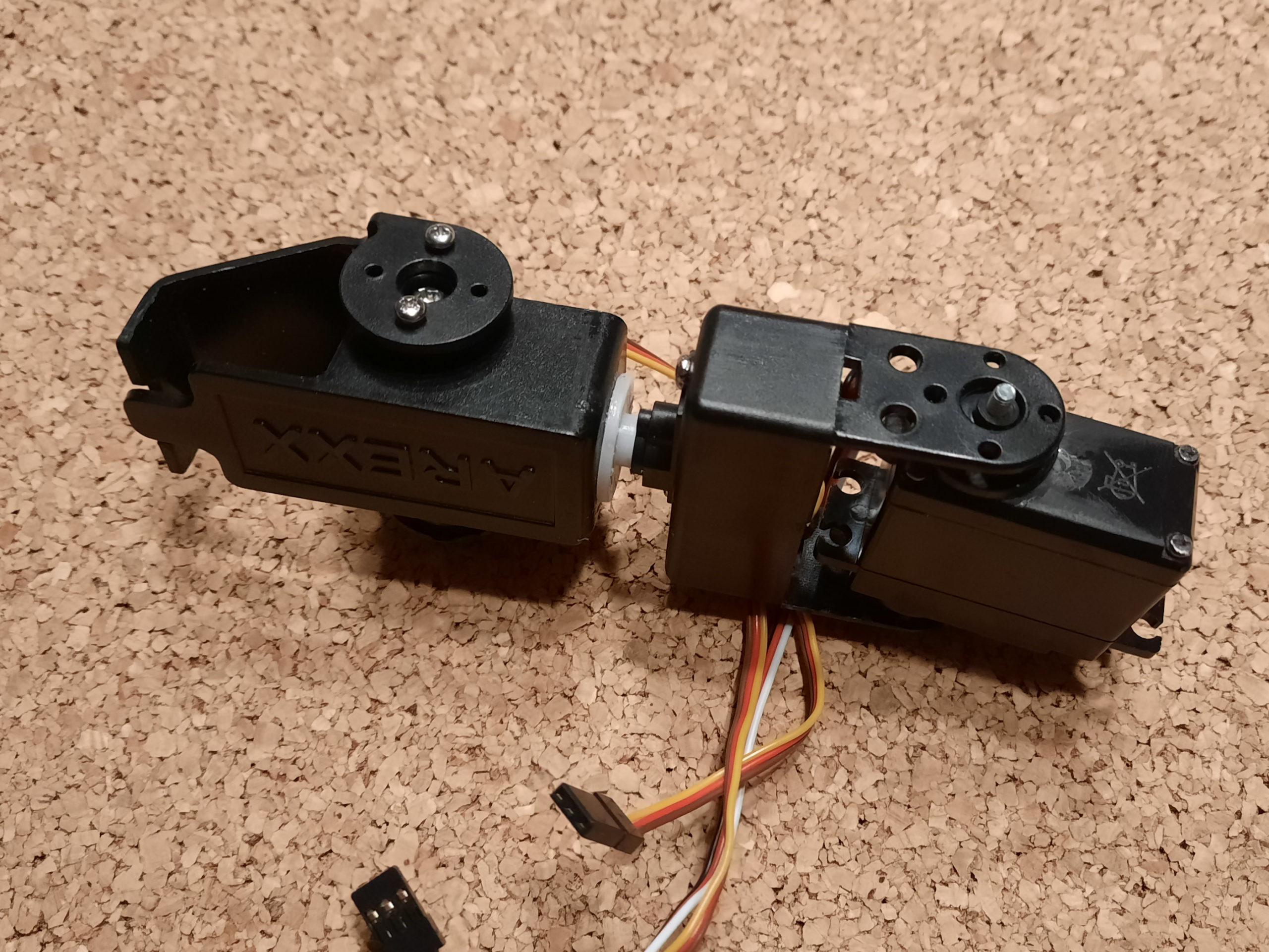
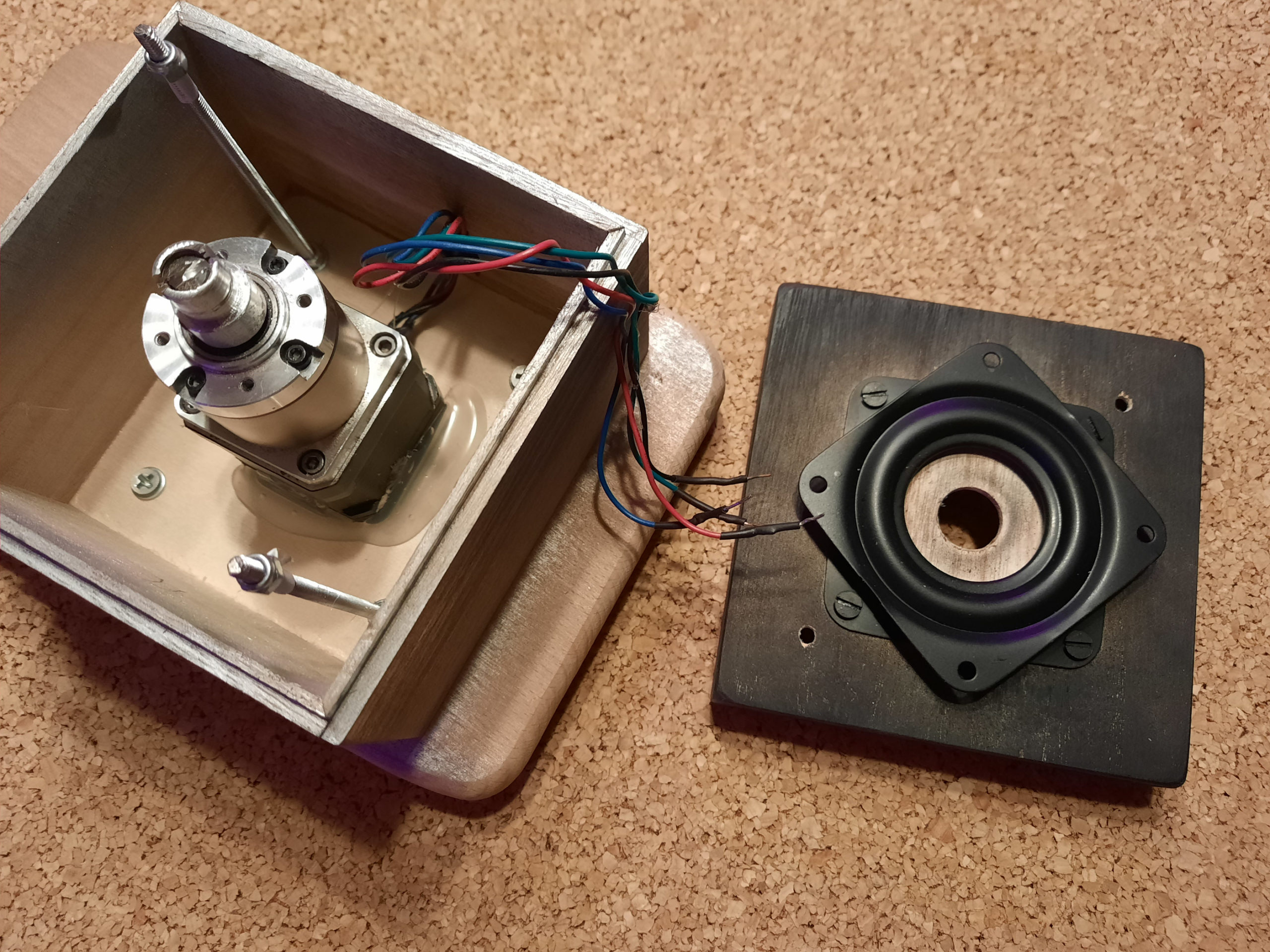
Der Arexx-Bausatz schien mechanisch nicht so geeignet, da nehmen wir nur ein paar Teile. In den Fuß kommt ein kräftig untersetzter Stepper mit Kugellager und die meisten Servos besser mit Metallgetriebe.

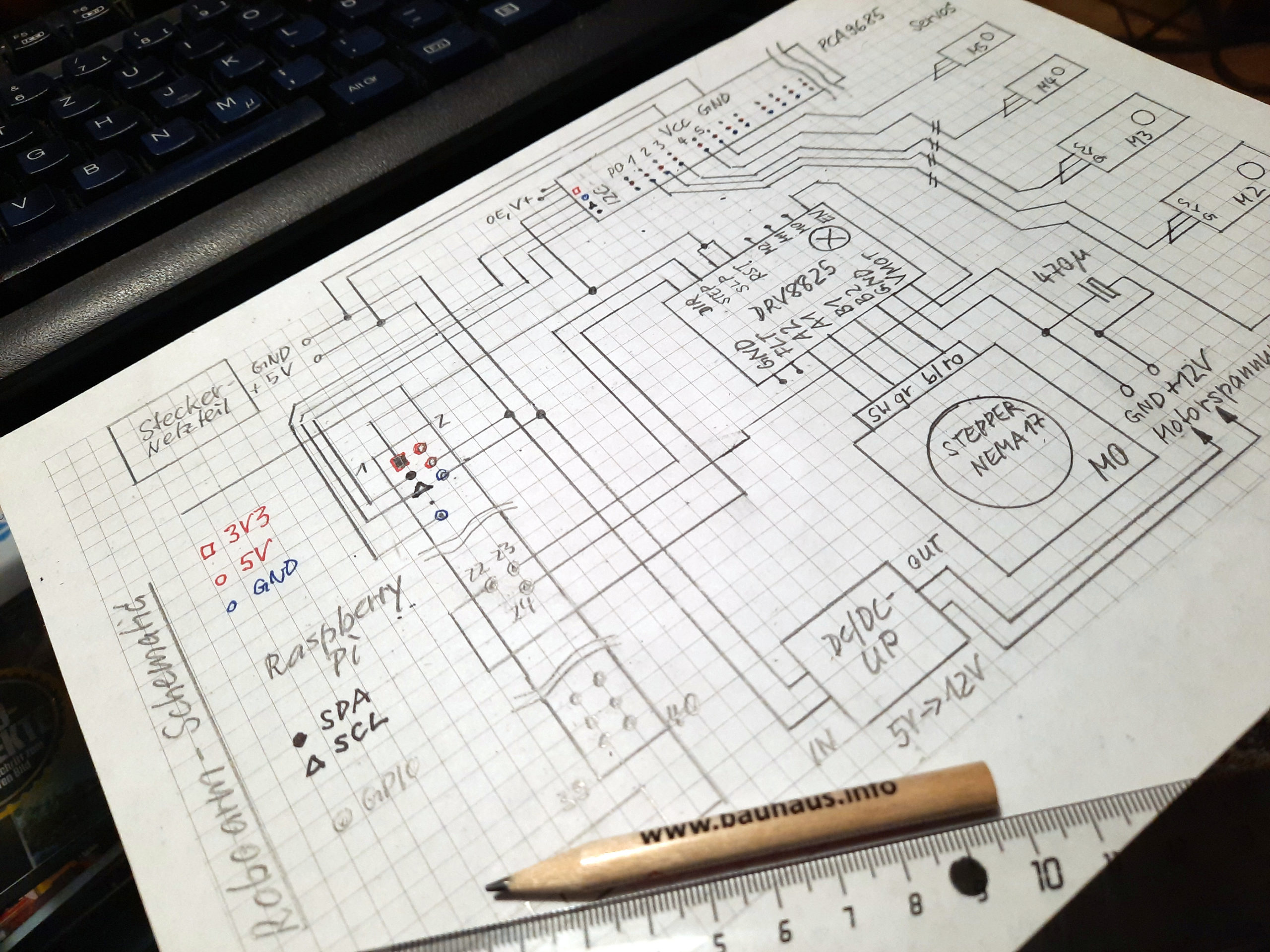
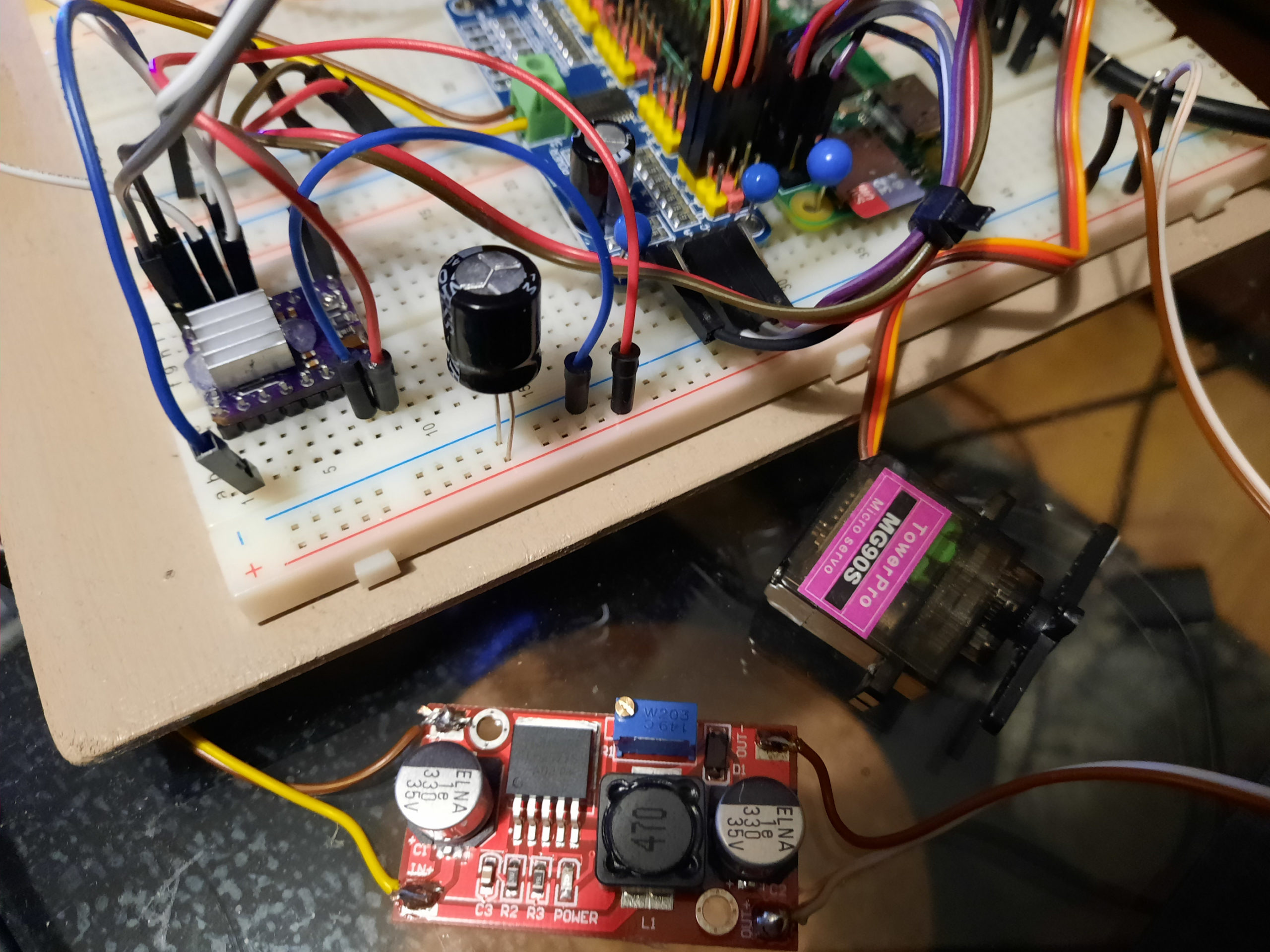
Elektronik und Software wie immer parallel und unter Modultests entwickeln, damit die Motoren nach dem Einbau auch im richtigen Winkel schwenken. Hat man dazu keine Lust mehr, kann man an Grundplatte und Gehäuse weiterbauen…
Ein Sechsgelenkiger sollte es schon sein, ganz ähnlich, wie man einen menschlichen Arm so kennt. Der schwere Steppermotor im Gehäuse sorgt für das notwendige Gewicht für maximale Ausladung.
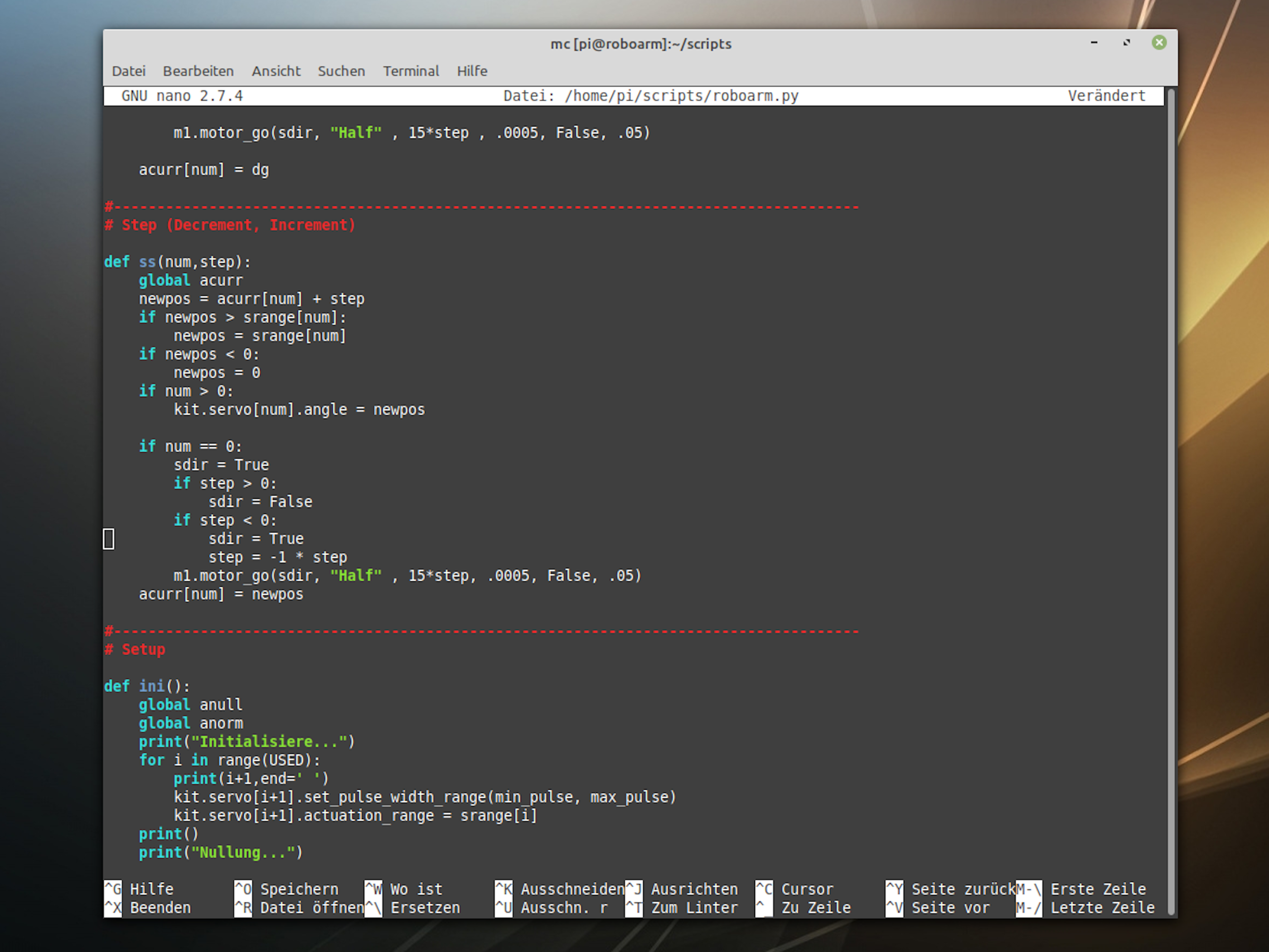

Gesteuert wird er durch einen Raspberry Pi, nebst Python Script. Die bevorzugte Variante für unsere Neuentwicklungen derzeit, wenn keine große Rechenleistung benötigt wird. Leider hat der neue Pico kein WiFi.

Und Aufgaben hat er auch schon übernommen, wie die Ziehung der Zahlen für die Auslosung der monatlichen Titelbilder in unserer FB-Gruppe…